Let us first look at an easier version of the proof, one that does not require rotating your coordinate system. Recall the dot product of \(\vec{a}\) and \(\vec{b}\) is a scalar (\(s\)):
\[\vec{a}\cdot\vec{b}=a_xb_x+a_yb_y+a_zb_z=s\]
\(s\), obviously enough, is invariant with different coordinate systems, its just a number. So in otherwords, for every vector \(\vec{a}\), there must exist three numbers such that:
\[a_xb_1+a_yb_2+a_zb_3=s\]
where \(b_{1,2,\text{ and }3}\) corresponds to the three components of some vector \(\vec{b}\)
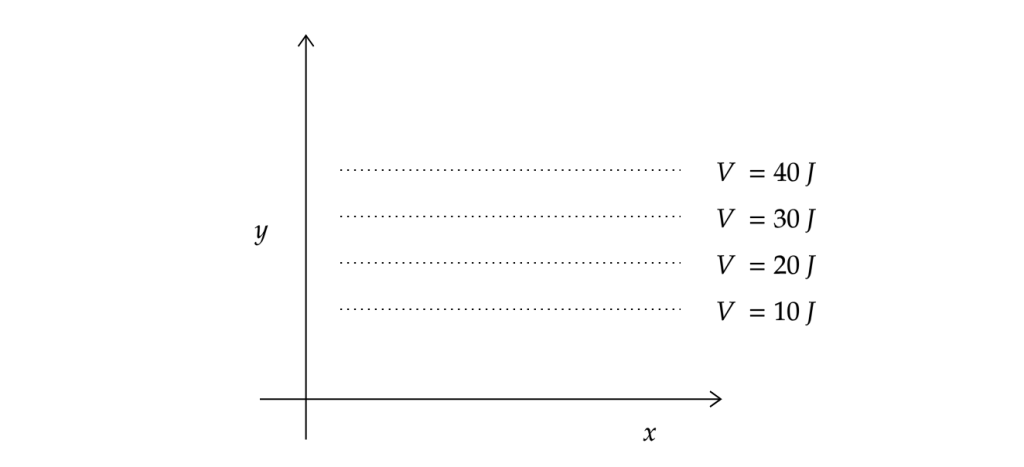
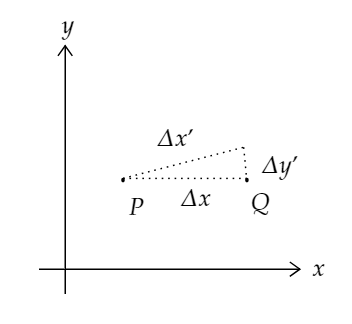
Let’s go back to the temperature field \(T\). Suppose at point \(P\) the temperature of the metal is \(T_P\) and at point \(Q\) separated by a interval \(\Delta \vec{r}\) from \(P\), temperature is \(T_Q\). (\(\vec{r}\) is a vector of three components: \(\Delta x, \Delta y\) and \(\Delta z\), respectively.)The difference in temperature \(\Delta T = T_P – T_Q\). Note that \(\Delta T\) is invariant of the coordinate system, it is a scalar. If we choose a convenient coordinate system, we can write what we have defined simply as: \(T_P=T(x,y,z)\) and \(T_Q=T(x+\Delta x, y+\Delta y, z+\Delta z)\). And using the definition of the partial derivative:
\[\Delta f(x,y,z)=\Delta x\pdv{f}{x}+\Delta y\pdv{f}{y}+\Delta z\pdv{f}{z}\]
(Note that the above definition only works for \(\Delta x,y,\text{ and }z\) approching 0)
we can write:
\[\Delta T=\Delta x\pdv{T}{x}+\Delta y\pdv{T}{y}+\Delta z\pdv{T}{z}\]
The left hand side \(\Delta T\), we know as a fact to be a scalar, where as the right hand side is the sum of three products with \(\Delta x,y,\text{ and }z\), as per our previously proven point at the beginning of this excercise, the components \(\pdv{T}{x},\pdv{T}{y},\pdv{T}{z}\) must form a three-vector. We may express this new vector with the notation \(\nabla T\), it can be read as ‘del’, ‘nabla’ and perhaps more commonly as ‘the gradient of T (grad T)’
If you are still not convinced, perhaps you ought to try it yourself using the method of rotating your axes?
As it happens, this proof will be beneficial in understanding what is about to come, as such, let us go through this together!
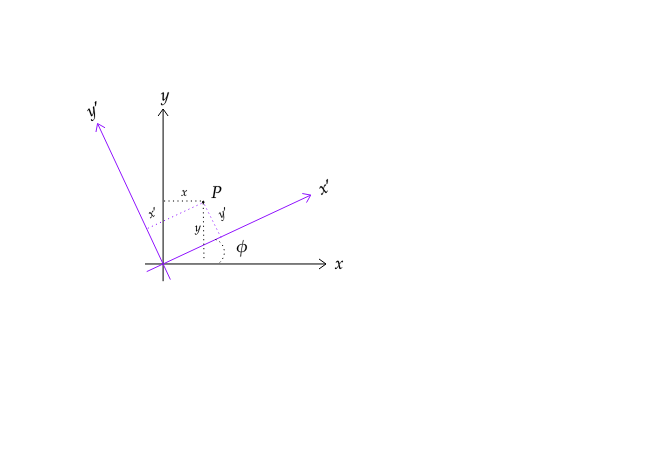
We shall establish this proof by showing the components of \(\Delta T\) (\(\pdv{T}{x},\pdv{T}{y},\pdv{T}{z}\)) will transform in the exact same way as the components of \(\vec{r}\) do. Let us start by defining a new set of axes, \(x’,y’,z’\). For the sake of ease of visualisation, let us consider the case where \(z=z’\). So the transformation will look something like this: